研究方向
探索我们的研究领域和正在进行的项目
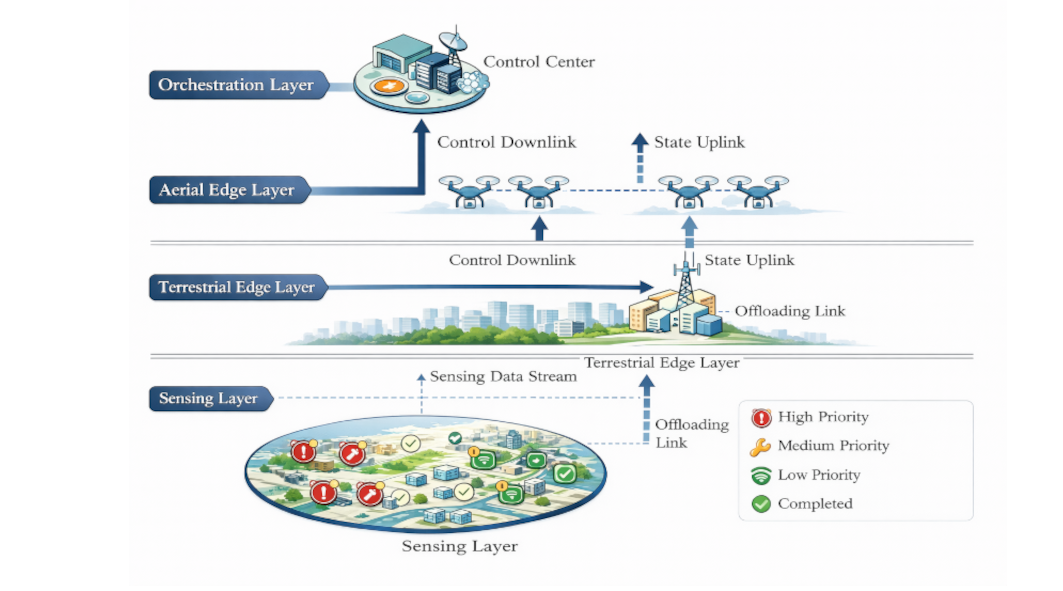
无人机增强网络系统与空地协同计算
本方向致力于解决后5G及6G时代物联网设备爆发式增长带来的连接与计算挑战,构建基于无人机(UAV)的空中智能增强网络层。研究重点聚焦于无人机作为空中基站或移动边缘计算(MEC)节点的关键机制,旨在突破传统地面基础设施在覆盖范围、部署灵活性及视距传输(LoS)方面的物理局限。主要研究内容包括建立高动态环境下的空地协同通信模型,设计多目标优化的资源调度策略,以及开发能够适应大规模、异构物联网设备的按需服务协议。通过深入分析无人机能耗模型、通信链路质量及计算任务特性,探索如何在有限的机载能量预算下,最大化系统的吞吐量、数据采集完整性及能源利用效率。此外,本方向还关注多无人机协同作业中的负载均衡与干扰管理,通过数学建模与仿真验证,为构建弹性、高效、泛在的空地一体化信息网络提供理论支撑与技术验证。
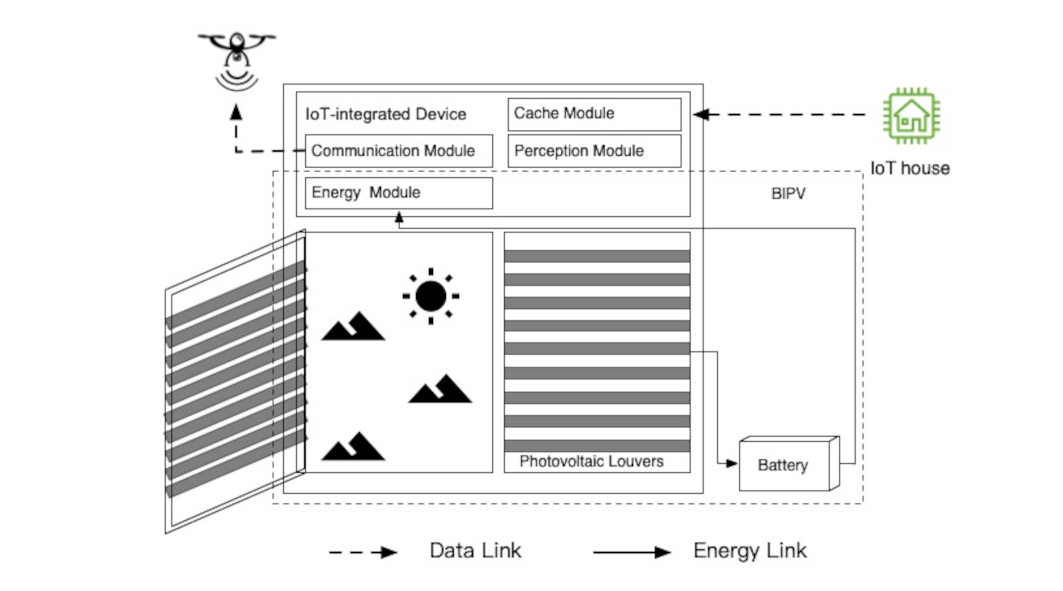
面向高层建筑的隐私感知无人机MEC服务
本方向针对高层建筑密集城区的特殊场景,特别是针对嵌入式智能窗(IoT-enabled Windows)产生的密集计算需求,提出了一种创新的面向服务的分段轨迹设计方案。该研究核心在于解决高层建筑垂直表面设备的计算卸载难题,同时严格应对无人机抵近作业带来的视觉隐私泄露风险。我们构建了计算卸载轨迹优化问题(COTOP),证明了其NP-hard特性,并提出了一种基于变量策略强化学习的Lin-Kernighan-Helsgaun(VSRL)算法。更为关键的是,设计了服务导向的分段轨迹精炼算法(SOS-TRA),该算法引入了严格的视觉隐私保护约束,在确保无人机与智能窗建立可靠视距链路进行高效计算卸载的同时,通过优化航点和飞行走廊,避免对居民隐私的侵扰。该方案在保障高能效和低延迟服务体验的同时,实现了技术性能与社会伦理规范的平衡,为智慧城市高空服务提供了可行的落地范式。
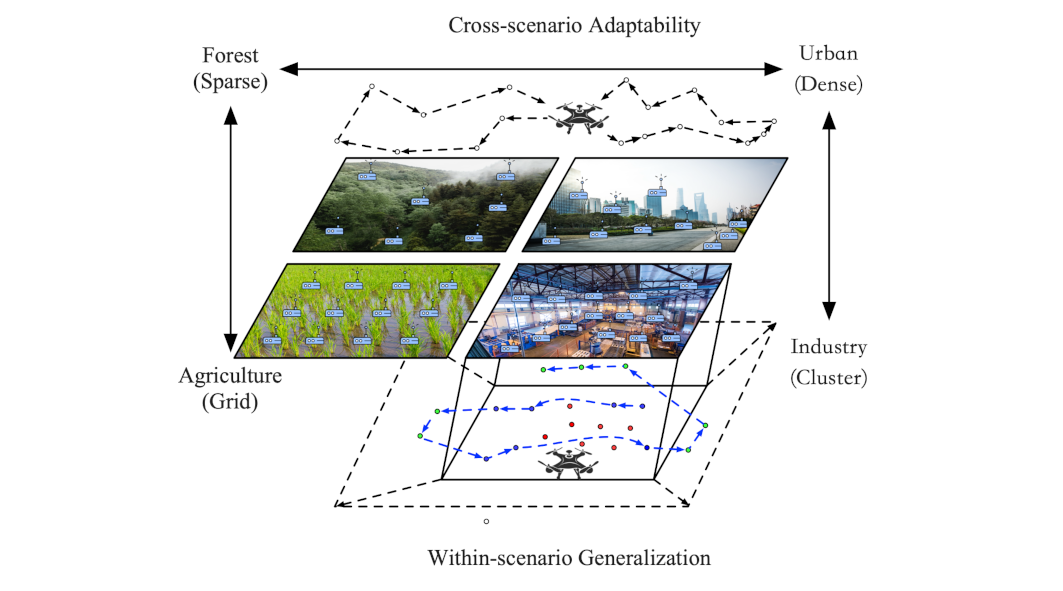
基于训练-推理分离的敏捷无人机服务编排
本方向旨在解决动态物联网环境下无人机轨迹规划泛化性差和在线计算开销大的核心痛点,提出了一种创新的训练-推理分离(Training-Inference Separation, TIS)计算范式。研究涵盖两大核心框架:ADAPT-GUAV与基于热力图引导的敏捷服务编排。针对传统优化算法耗时久、深度强化学习模型难以适应拓扑变化的问题,我们设计了难度自适应的课程学习策略和逻辑感知的锚点选择算法,在离线阶段利用高性能算力学习不同空间分布(如森林、城市、农业、工厂)的通用路由模式。在在线阶段,利用预训练的图神经网络和注意力机制模型,实现毫秒级的轨迹推理与重规划,无需重新训练即可适应节点动态增减及位置变化。此外,通过引入概率热力图引导的蒙特卡洛树搜索,实现了多无人机系统的负载均衡与能耗公平性。该研究大幅降低了机载计算延迟,实现了从静态优化到动态敏捷响应的跨越,确保了无人机集群在未知复杂环境中的鲁棒性与服务连续性。